Управление Motorola GM360 через ПК+Telegram
- В статье будет рассмотрен вариант взаимодействия с передней панелью “американской” версии GM360. Этот способ также применим и для “европейских” GM360.
- Механизмы приема и передачи аудиосигнала в этой статье НЕ РАССМАТРИВАЮТСЯ
- Вы можете использовать идеи, описанные в статье по своему усмотрению. Помните о том, что любые действия, описанные в данной инструкции, вы совершаете на СВОЙ СТРАХ И РИСК. Автор не несет никакой ответственности за возможный выход из строя вашего оборудования.
Часть 1. Аппаратная.
Детали и материалы
- Arduino Uno - 1шт.
- Резисторы близкие к номиналам 13К - 2шт, 22К - 2шт, 43К - 2шт.
- Мелкие диоды Шоттки - 7шт.
Алгоритм обнаружения нажатия клавиш
Внимательно смотрим сервис-мануал и видим, что каждая кнопка имеет условные “координаты” ROW(строка) и COL (столбец).
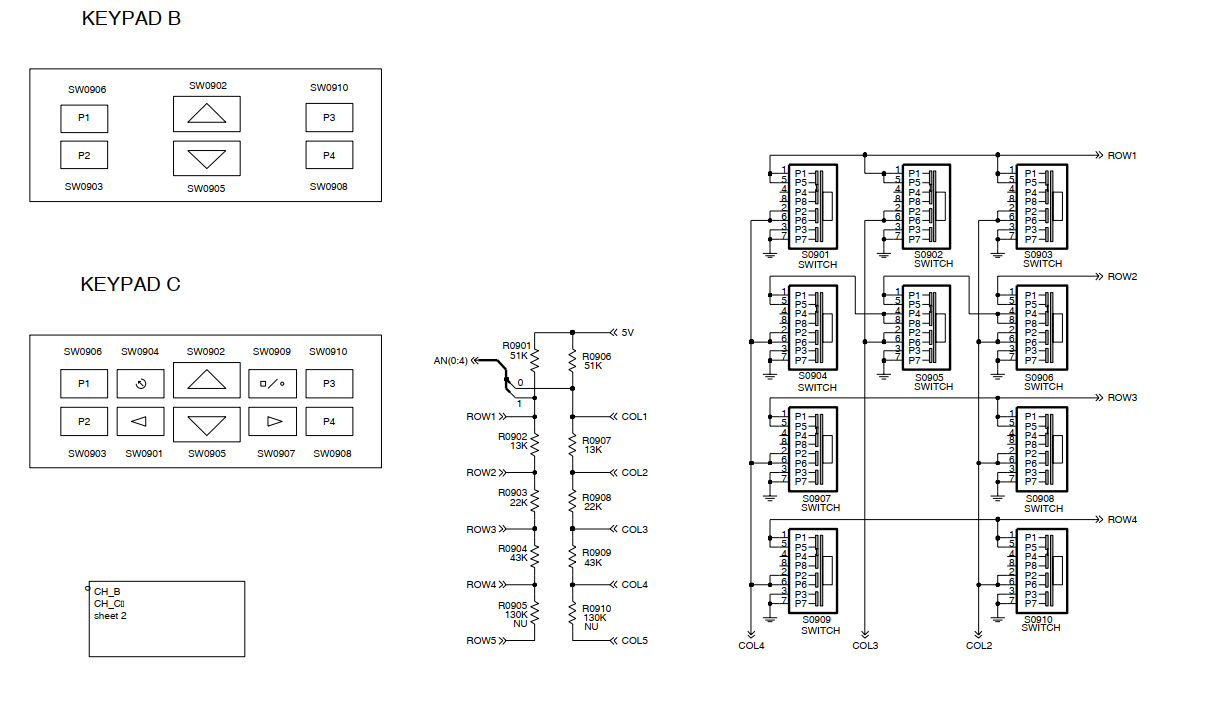
Motorola GM использует двумерную резистивную матрицу для обнаружения нажатых клавиш передней панели. При нажатии происходит “просадка” линии COL и линии ROW через цепочку резисторов на землю. Путем измерения напряжения на соотвествующих линиях процессор определяет какая именно клавиша была нажата.
Вывод контрольных точек наружу
Еще раз внимательно смотрим на схему матрицы. Контрольные точки обведены красным.
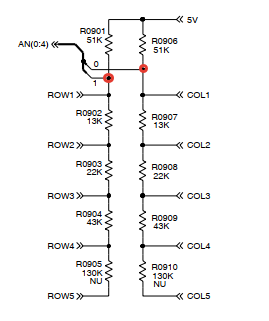
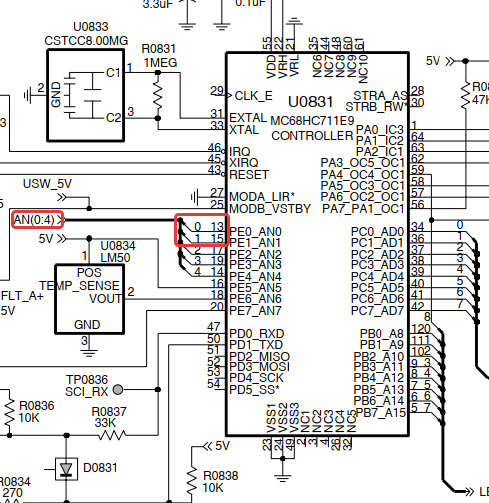
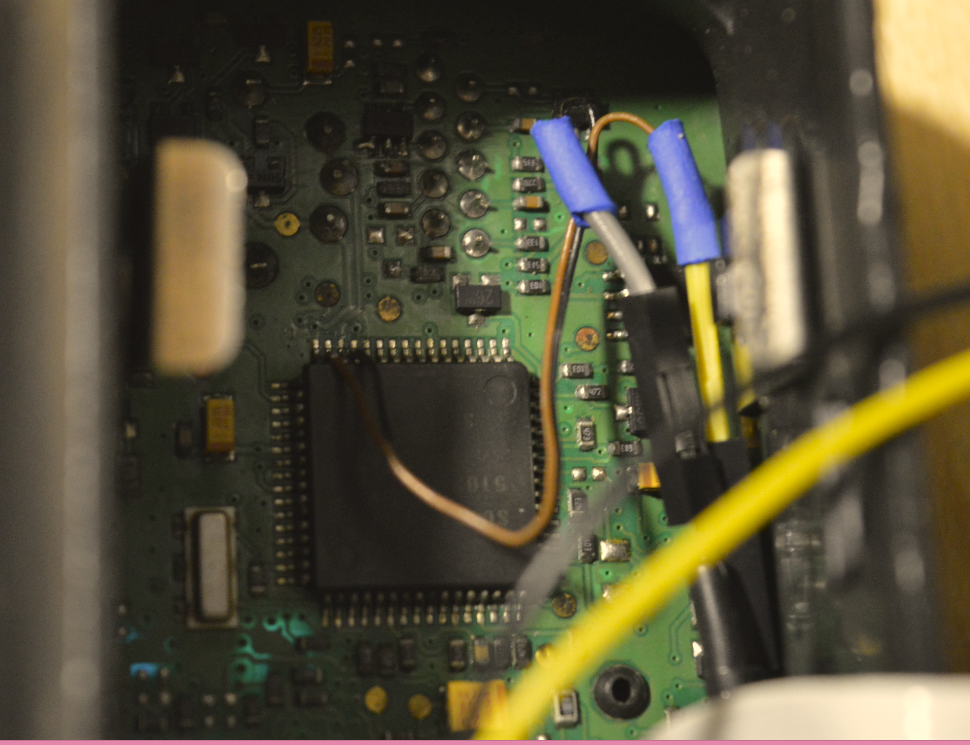
Чтобы иметь возможность “нажимать” кнопки удаленно, потребуется вывести их наружу. Самым простым способом оказалось подпаяться к 13 (COL) и 15 (ROW) аналоговым входам чипа передней панели.
Я подпаял тонкие проводки с “мамами” на конце, чтобы можно было полностью снять переднюю панель при необходимости.
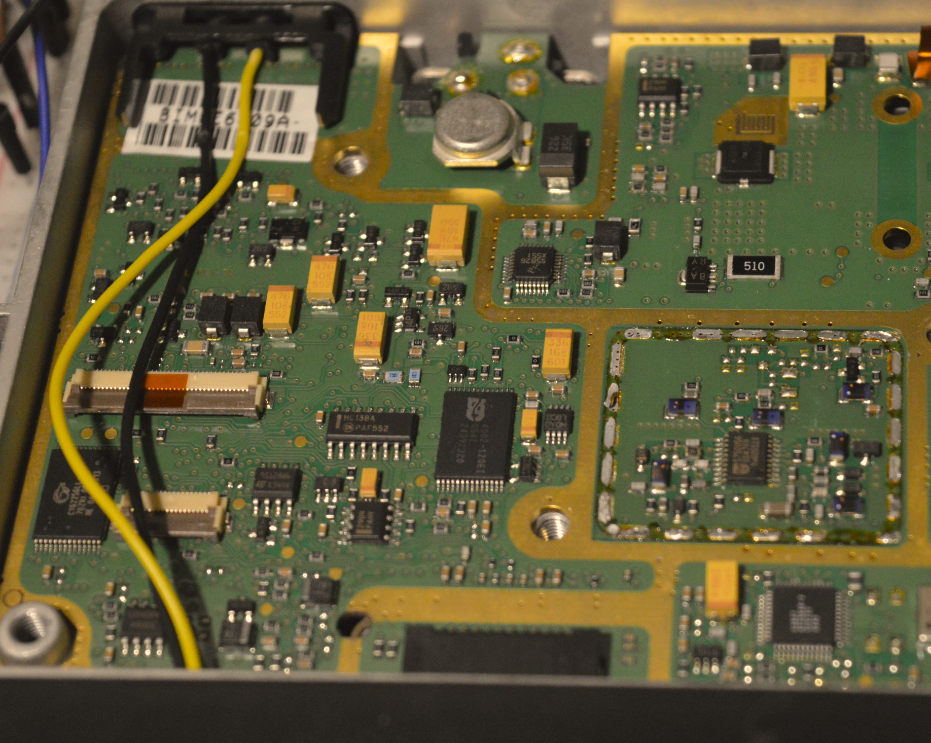
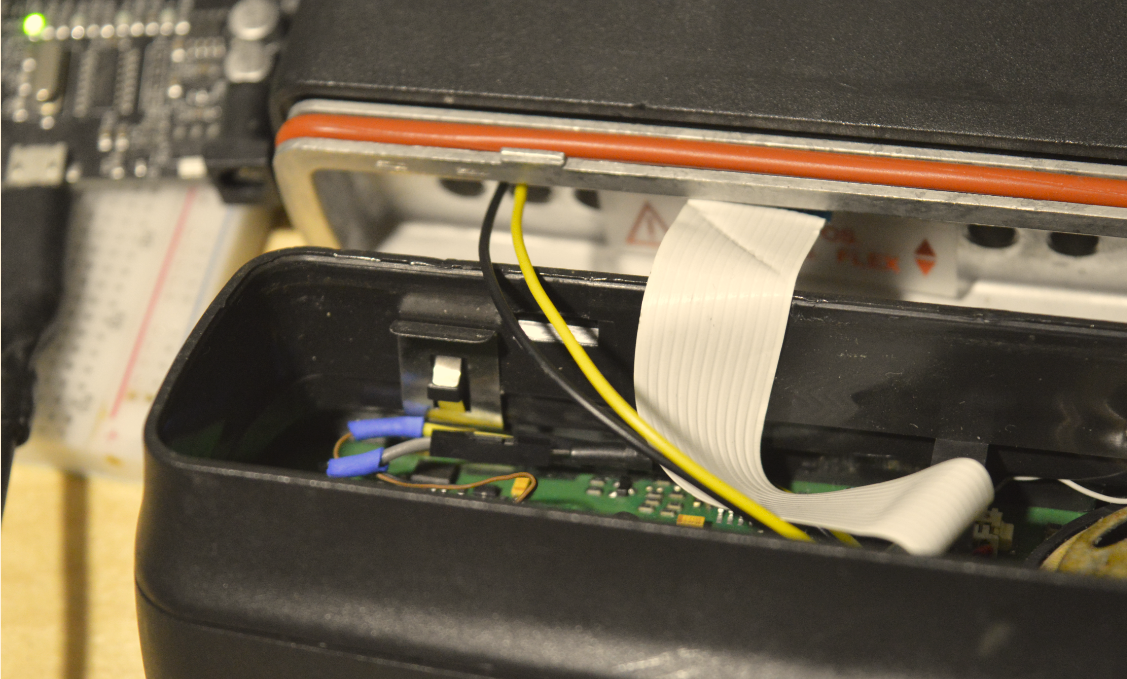
Далее протягиваем два тонких провода “папа-папа” (я взял с макетки ардуино) на верхнюю часть заднего аксессуарного разъема, где имеются свободные отверстия, но отсутствуют контактные штыри.

На фото видны выведенные назад провода черного и желтого цвета.
И сзади эти провода видны как красный и желтый
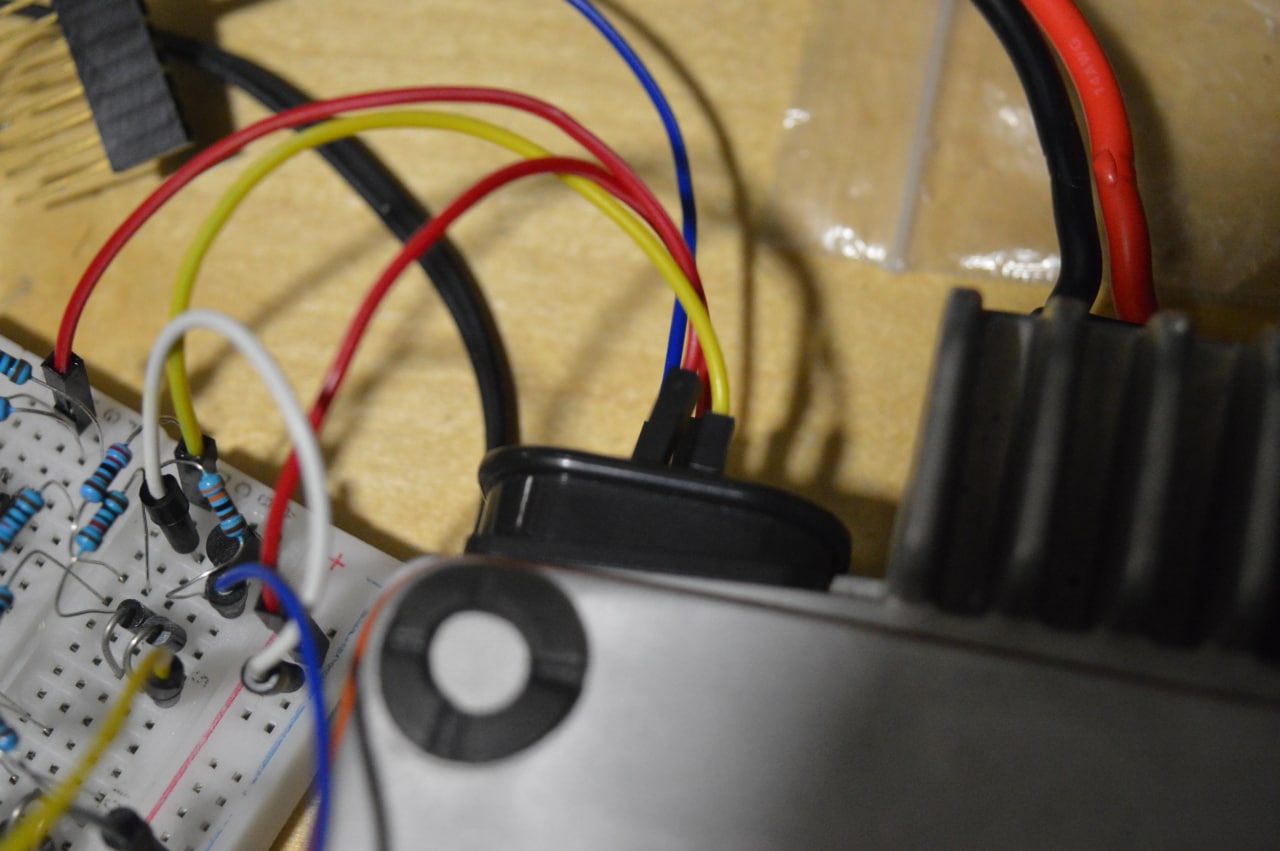
Схема подключения Arduino к мотору
Для съема показаний дисплея потребуется подключить шину данных к пину D2. Дублер резистивной матрицы подключаем к дополнительным выводам аксессуарного разъема, которые мы приготовили в предыдущем шаге.
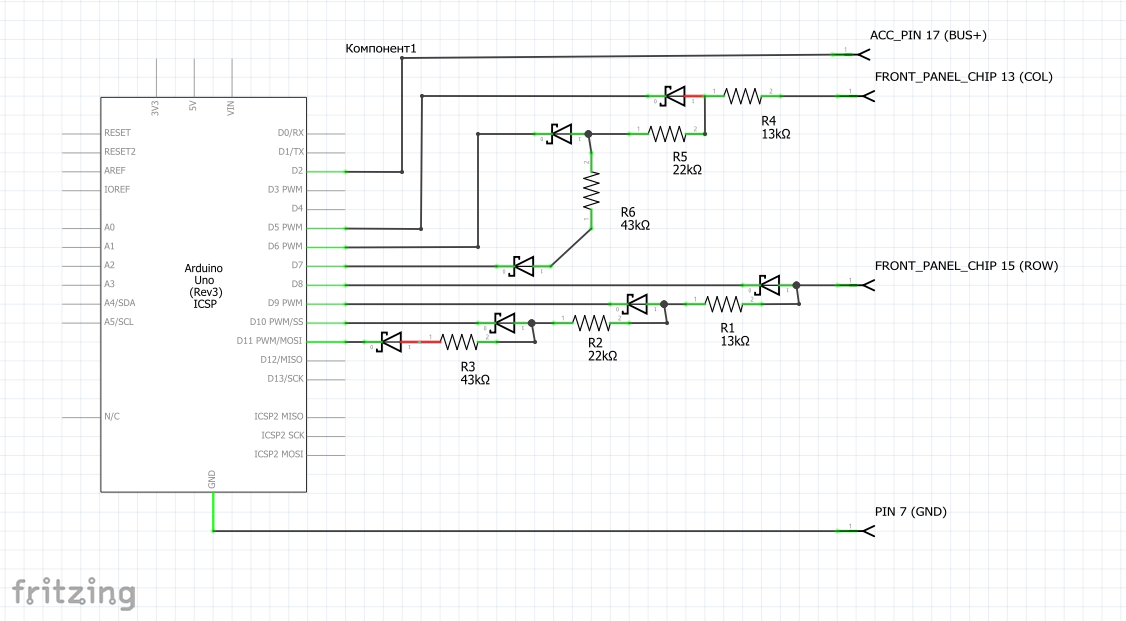
Схему можно открыть с помощью Fritzing Скачать бесплатно develop-версию можно на гитхабе
Часть 2. Программная.
Arduino
Ниже приведен пример скетча, обеспечивающего взаимодействие радиостанции с внешним ПО по последовательному порту. По командам, принятым через порт, происходит “нажатие” требуемых кнопок. Показания дисплея периодически отправляются так же через последовательный порт и могут быть использованы в качестве обратной связи для подтверждения нажатия той или иной клавиши. Используйте Arduino IDE чтобы запрограммировать вашу плату.
//https://t.me/SATCOM_UHF
#include <SoftwareSerial.h>
SoftwareSerial bus(2, 3);
void setup()
{
int i = 5;
while (i <= 11)
{
pinMode(i, OUTPUT);
digitalWrite(i, HIGH);
i++;
}
digitalWrite(8, LOW);
Serial.begin(115200);
bus.begin(9600);
bus.listen();
}
void click(int rowV, int colV, bool longClick)
{
bool levelR = rowV == 8;
digitalWrite(rowV, levelR);
digitalWrite(colV, LOW);
if (longClick)
{
delay(2000);
}
else
{
delay(250);
}
digitalWrite(rowV, !levelR);
digitalWrite(colV, HIGH);
}
bool Check(String expected, String received, int row, int col)
{
if (received.equalsIgnoreCase(expected))
{
click(row, col, received == expected);
return true;
}
return false;
}
void loop()
{
while (bus.available()) {
byte SBEP_byte = bus.read();
Serial.write(SBEP_byte);
}
if (Serial.available())
{
String cmd = Serial.readString();
Check("P2", cmd, 8, 5)
|| Check("UP", cmd, 8, 6)
|| Check("LEFT", cmd, 8, 7)
|| Check("P1", cmd, 9, 5)
|| Check("DOWN", cmd, 9, 6)
|| Check("EXIT", cmd, 9, 7)
|| Check("P4", cmd, 10, 5)
|| Check("RIGHT", cmd, 10, 7)
|| Check("P3", cmd, 11, 5)
|| Check("OK", cmd, 11, 7);
}
}
Бот
Шаг первый: создайте своего бота и получите токен для работы с ним. Подробно описывать этот шаг не имеет смысла, полно материалов в сети:
Статья еще не окончена…